Towards building a generative approach that is capable of synthesizing images of marine plastic using GANs
PROBLEM STATEMENT
Marine plastic pollution has been at the forefront of climate issues for the past decade. Not only does plastic in the ocean capable of killing marine life by strangulation or starvation but it is also a major factor in warming the ocean by trapping CO2. In recent years, there have been numerous attempts at cleaning the plastic that has been circling our oceans such as by the non-profit group, The Ocean Cleanup. The problem with a lot of cleanup processes is that it requires human labor and is not cost-efficient. There has been a lot of research done to automate this process by using Computer Vision and Deep Learning to detect marine debris to utilize ROVs and AUVs for cleanup.
Note: This is theoretical and we are working on publishing our paper. Once it gets peer-reviewed and gets published in a journal I will update this article. So, watch this space for the release of our academic paper!
Reading Resources: Our Paper on Using CV and DL to detect Epipelagic plastic, The University Of Minnesota’s paper on a general-purpose marine debris detecting algorithm, and The Ocean Cleanup’s paper on floating plastic detection on rivers.
The major issue for this approach is regarding the availability of datasets to train the computer vision models. The JAMSTEC-JEDI dataset is a good collection of Marine Debris off the coast of Japan on the seafloor. But, apart from this dataset, there is a huge discrepancy in the availability of datasets. For this reason, I’ve utilized the help of Generative Adversarial Networks; The DCGAN in particular to curate synthetic datasets that could theoretically be a close replica to real datasets over time. (I wrote theoretically because there are a lot of variables such as quality of real-images available, progress with GANs, training, etc).
GAN and DCGAN
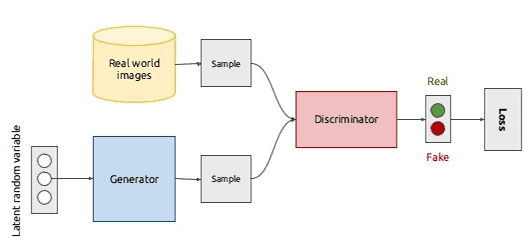
GANs or Generative Adversarial Networks were proposed by Ian Goodfellow et al in 2014. GANs consist of a simple 2 components called Generators and Discriminators. An oversimplification of the process is as follows: The Generators role is to generate new data and the Discriminators role is to distinguish between the generated data and the actual data. In the ideal scenario, the discriminator is unable to distinguish between the generated data and real data which results in ideal synthetic data points.
DCGAN is a direct extension of the GAN architecture mentioned above except it uses Deep Convolutional Layers in the discriminator and generator respectively. It was first described by Radford et. al in the paper Unsupervised Representation Learning With Deep Convolutional Generative Adversarial Networks. The discriminator is made up of strided convolutional layers while the generator is made up of convolutional transpose layers.
PyTorch Implementation
In this method, we are going to be applying the DCGAN architecture on the DeepTrash dataset ( Citation Link: https://zenodo.org/record/5562940#.YZa9Er3MI-R, Released under the Creative Commons Attribution 4.0 International license). If you’re not familiar with the DeepTrash dataset, consider reading my paper A Robotic Approach towards Quantifying Epipelagic Bound Plastic Using Deep Visual Models. DeepTrash is a collection of plastic images in the epipelagic layer and abyssopelagic layer of the ocean curated for marine plastic detection using computer vision.
Let's begin coding!
THE CODE
Installing Requirements
We start by installing all the basic requirements to building our GAN model such as Matplotlib and Numpy. We will also be utilizing all the tools (such as neural networks, transformations) from Pytorch. If you’re not familiar with PyTorch I recommend giving this article a read:
from __future__ import print_function
#%matplotlib inline
import argparse
import os
import random
import torch
import torch.nn as nn
import torch.nn.parallel
import torch.backends.cudnn as cudnn
import torch.optim as optim
import torch.utils.data
import torchvision.datasets as dset
import torchvision.transforms as transforms
import torchvision.utils as vutils
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.animation as animation
from IPython.display import HTML
# Set random seem for reproducibility
manualSeed = 999
#manualSeed = random.randint(1, 10000) # use if you want new results
print("Random Seed: ", manualSeed)
random.seed(manualSeed)
torch.manual_seed(manualSeed)Initializing our Hyperparameters
This step is fairly straightforward. We’re going to set up the hyperparameters that we want to train the Neural Network with. These hyperparameters are borrowed straight from the paper and PyTorch’s tutorial on training GANs.
# Root directory for dataset
# NOTE you don't have to create this. It will be created for you in the next block!
dataroot = "/content/pgan"
# Number of workers for dataloader
workers = 4
# Batch size during training
batch_size = 128
# Spatial size of training images. All images will be resized to this
# size using a transformer.
image_size = 64
# Number of channels in the training images. For color images this is 3
nc = 3
# Size of z latent vector (i.e. size of generator input)
nz = 100
# Size of feature maps in generator
ngf = 64
# Size of feature maps in discriminator
ndf = 64
# Number of training epochs
num_epochs = 300
# Learning rate for optimizers
lr = 0.0002
# Beta1 hyperparam for Adam optimizers
beta1 = 0.5
# Number of GPUs available. Use 0 for CPU mode.
ngpu = 1
Generator and Discriminator Architectures
Now, we define the architectures for the generator and discriminator.
# Generator
class Generator(nn.Module):
def __init__(self, ngpu):
super(Generator, self).__init__()
self.ngpu = ngpu
self.main = nn.Sequential(
nn.ConvTranspose2d( nz, ngf * 8, 4, 1, 0, bias=False),
nn.BatchNorm2d(ngf * 8),
nn.ReLU(True),
nn.ConvTranspose2d(ngf * 8, ngf * 4, 4, 2, 1, bias=False),
nn.BatchNorm2d(ngf * 4),
nn.ReLU(True),
nn.ConvTranspose2d( ngf * 4, ngf * 2, 4, 2, 1, bias=False),
nn.BatchNorm2d(ngf * 2),
nn.ReLU(True),
nn.ConvTranspose2d( ngf * 2, nc, 4, 2, 1, bias=False),
nn.Tanh()
)
def forward(self, input):
return self.main(input)
# Discriminator
class Discriminator(nn.Module):
def __init__(self, ngpu):
super(Discriminator, self).__init__()
self.ngpu = ngpu
self.main = nn.Sequential(
nn.Conv2d(nc, ndf, 4, 2, 1, bias=False),
nn.LeakyReLU(0.2, inplace=True),
nn.Conv2d(ndf, ndf * 2, 4, 2, 1, bias=False),
nn.BatchNorm2d(ndf * 2),
nn.LeakyReLU(0.2, inplace=True),
nn.Conv2d(ndf * 2, ndf * 4, 4, 2, 1, bias=False),
nn.BatchNorm2d(ndf * 4),
nn.LeakyReLU(0.2, inplace=True),
nn.Conv2d(ndf * 4, 1, 4, 1, 0, bias=False),
nn.Sigmoid()
)
def forward(self, input):
return self.main(input)Defining the Training Function
After defining the Generator and Discriminator classes, we move on to defining the training function. The training function takes in the generator, discriminator, optimization functions, and the number of epochs as the arguments. We train the generator and discriminator by recursively calling the train function until the required number of epochs. We do this by iterating through the dataloader and updating the discriminator with new images from the generator and calculating and updating the loss function.
def train(args, gen, disc, device, dataloader, optimizerG, optimizerD, criterion, epoch, iters):
gen.train()
disc.train()
img_list = []
fixed_noise = torch.randn(64, config.nz, 1, 1, device=device)
# Establish convention for real and fake labels during training (with label smoothing)
real_label = 0.9
fake_label = 0.1
for i, data in enumerate(dataloader, 0):
#*****
# Update Discriminator
#*****
## Train with all-real batch
disc.zero_grad()
# Format batch
real_cpu = data[0].to(device)
b_size = real_cpu.size(0)
label = torch.full((b_size,), real_label, device=device)
# Forward pass real batch through D
output = disc(real_cpu).view(-1)
# Calculate loss on all-real batch
errD_real = criterion(output, label)
# Calculate gradients for D in backward pass
errD_real.backward()
D_x = output.mean().item()
## Train with all-fake batch
# Generate batch of latent vectors
noise = torch.randn(b_size, config.nz, 1, 1, device=device)
# Generate fake image batch with G
fake = gen(noise)
label.fill_(fake_label)
# Classify all fake batch with D
output = disc(fake.detach()).view(-1)
# Calculate D's loss on the all-fake batch
errD_fake = criterion(output, label)
# Calculate the gradients for this batch
errD_fake.backward()
D_G_z1 = output.mean().item()
# Add the gradients from the all-real and all-fake batches
errD = errD_real + errD_fake
# Update D
optimizerD.step()
#*****
# Update Generator
#*****
gen.zero_grad()
label.fill_(real_label) # fake labels are real for generator cost
# Since we just updated D, perform another forward pass of all-fake batch through D
output = disc(fake).view(-1)
# Calculate G's loss based on this output
errG = criterion(output, label)
# Calculate gradients for G
errG.backward()
D_G_z2 = output.mean().item()
# Update G
optimizerG.step()
# Output training stats
if i % 50 == 0:
print('[%d/%d][%d/%d]\tLoss_D: %.4f\tLoss_G: %.4f\tD(x): %.4f\tD(G(z)): %.4f / %.4f'
% (epoch, args.epochs, i, len(dataloader),
errD.item(), errG.item(), D_x, D_G_z1, D_G_z2))
wandb.log({
"Gen Loss": errG.item(),
"Disc Loss": errD.item()})
# Check how the generator is doing by saving G's output on fixed_noise
if (iters % 500 == 0) or ((epoch == args.epochs-1) and (i == len(dataloader)-1)):
with torch.no_grad():
fake = gen(fixed_noise).detach().cpu()
img_list.append(wandb.Image(vutils.make_grid(fake, padding=2, normalize=True)))
wandb.log({
"Generated Images": img_list})
iters += 1
Monitoring and Training the DCGAN
After we’ve established the Generator, Discriminator, and Train functions the final step is to simply call the train function for the number of epochs we defined. I’ve also used Wandb which allows us to monitor our training.
#hide-collapse
wandb.watch_called = False
# WandB – Config is a variable that holds and saves hyperparameters and inputs
config = wandb.config # Initialize config
config.batch_size = batch_size
config.epochs = num_epochs
config.lr = lr
config.beta1 = beta1
config.nz = nz
config.no_cuda = False
config.seed = manualSeed # random seed (default: 42)
config.log_interval = 10 # how many batches to wait before logging training status
def main():
use_cuda = not config.no_cuda and torch.cuda.is_available()
device = torch.device("cuda" if use_cuda else "cpu")
kwargs = {'num_workers': 1, 'pin_memory': True} if use_cuda else {}
# Set random seeds and deterministic pytorch for reproducibility
random.seed(config.seed) # python random seed
torch.manual_seed(config.seed) # pytorch random seed
np.random.seed(config.seed) # numpy random seed
torch.backends.cudnn.deterministic = True
# Load the dataset
transform = transforms.Compose(
[transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
trainset = datasets.CIFAR10(root='./data', train=True,
download=True, transform=transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=config.batch_size,
shuffle=True, num_workers=workers)
# Create the generator
netG = Generator(ngpu).to(device)
# Handle multi-gpu if desired
if (device.type == 'cuda') and (ngpu > 1):
netG = nn.DataParallel(netG, list(range(ngpu)))
# Apply the weights_init function to randomly initialize all weights
# to mean=0, stdev=0.2.
netG.apply(weights_init)
# Create the Discriminator
netD = Discriminator(ngpu).to(device)
# Handle multi-gpu if desired
if (device.type == 'cuda') and (ngpu > 1):
netD = nn.DataParallel(netD, list(range(ngpu)))
# Apply the weights_init function to randomly initialize all weights
# to mean=0, stdev=0.2.
netD.apply(weights_init)
# Initialize BCELoss function
criterion = nn.BCELoss()
# Setup Adam optimizers for both G and D
optimizerD = optim.Adam(netD.parameters(), lr=config.lr, betas=(config.beta1, 0.999))
optimizerG = optim.Adam(netG.parameters(), lr=config.lr, betas=(config.beta1, 0.999))
# WandB – wandb.watch() automatically fetches all layer dimensions, gradients, model parameters and logs them automatically to your dashboard.
# Using log="all" log histograms of parameter values in addition to gradients
wandb.watch(netG, log="all")
wandb.watch(netD, log="all")
iters = 0
for epoch in range(1, config.epochs + 1):
train(config, netG, netD, device, trainloader, optimizerG, optimizerD, criterion, epoch, iters)
# WandB – Save the model checkpoint. This automatically saves a file to the cloud and associates it with the current run.
torch.save(netG.state_dict(), "model.h5")
wandb.save('model.h5')
if __name__ == '__main__':
main()
Results
We plot the loss incurred by the generator and discrimination during training.
plt.figure(figsize=(10,5))
plt.title("Generator and Discriminator Loss During Training")
plt.plot(G_losses,label="G")
plt.plot(D_losses,label="D")
plt.xlabel("iterations")
plt.ylabel("Loss")
plt.legend()
plt.show()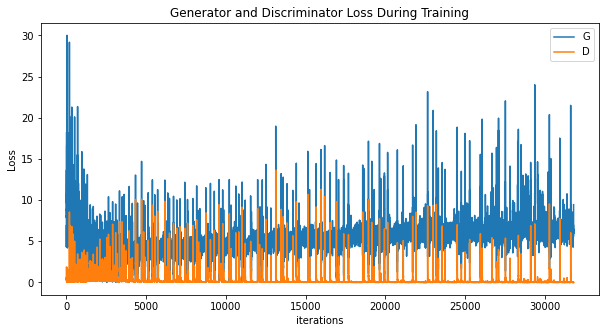
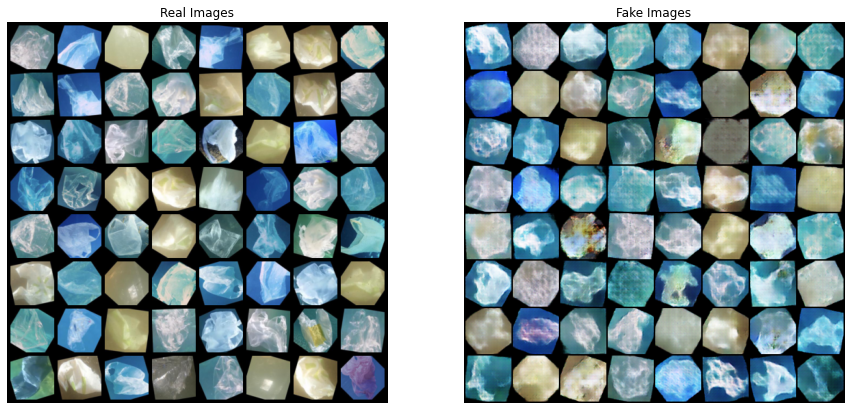
We can also pull up an animation of how the generator was generating images to see a difference between the real and the fake images.
#%%capture
fig = plt.figure(figsize=(8,8))
plt.axis("off")
ims = [[plt.imshow(np.transpose(i,(1,2,0)), animated=True)] for i in img_list]
ani = animation.ArtistAnimation(fig, ims, interval=1000, repeat_delay=1000, blit=True)
HTML(ani.to_jshtml())CONCLUSION
In this article, we discussed the use of Deep Convolution Generative Adversarial Networks to generate synthetic images of marine plastic that can be used by researchers to extend their current dataset of marine plastic. This can help with giving researchers the ability to extend their dataset with a mix of real and synthetic images. As you can see with the results, the GAN still needs a lot of work. The ocean is a complex environment with varying illumination, turbidity, blur, etc. But this is a theoretical starting point that other researchers can build off of. If you’re interested in improving the results and building a better network architecture, please reach out to me at gautamtata.blog@gmail.com.